Abilityは個人事業主ではありますが、様々なシステム開発に携わってまいりました。
これまで培ってきた技術をもとに先進的技術を、お客様へ提供できるよう日々精進してまいります。
開発
開発実績
■業務系システム
BS文字放送システム、顧客管理システム、在庫管理システム、工程管理システム、自動配車システム(最適化に遺伝的アルゴリズム使用)等 多数
■制御系システム
カーナビゲーションシステム、複合機ミドルウェア、製鉄所向け加熱プロコン(FA)、2D画像自動検査システム、3D計測システム(某国立大学との共同開発)、産業用ロボットアームのRos制御システム等 多数
■開発環境
OS:Windows、Linux
言語:C、C++、C++/CLI、C#、VB.Net、Python
開発のご用命は「お問い合わせ」フォームよりご連絡ください。
研究
Abilityでは様々な研究にチャレンジしています。
■3D計測データ作成処理
ターンテーブルを360°回転し物体を撮影、点群データを取得します。
画面左はカメラ画像、画面右は計測した点群データをもとにOpenGLで表示します。
OS:Windows7、WEBカメラ:Logicool、ターンテーブル:ステッピングモーター
言語:C++/CLI、画像処理:OpenCV、OpenGL、データ処理:PCL、マイコン:Arduino Nano
■ROSからのロボットアーム制御と画像処理
上部からロボットアームと対象物を撮影し、指定した色(今回は黄色)のブロックを識別し、ロボットアームで移動します。
PCの画面左上が指定色のブロックのみ識別した画面、左下がカメラ画像です。
途中で追加したブロックも判別し移動します。
OS:Linux(Ubuntu(18.04))、Ros:Melodic、WEBカメラ:Logicool、ロボットアーム:Mirobot
言語:C++、画像処理:OpenCV、ロボット制御:KDL(運動学、逆運動学)
■教育用ロボットアーム
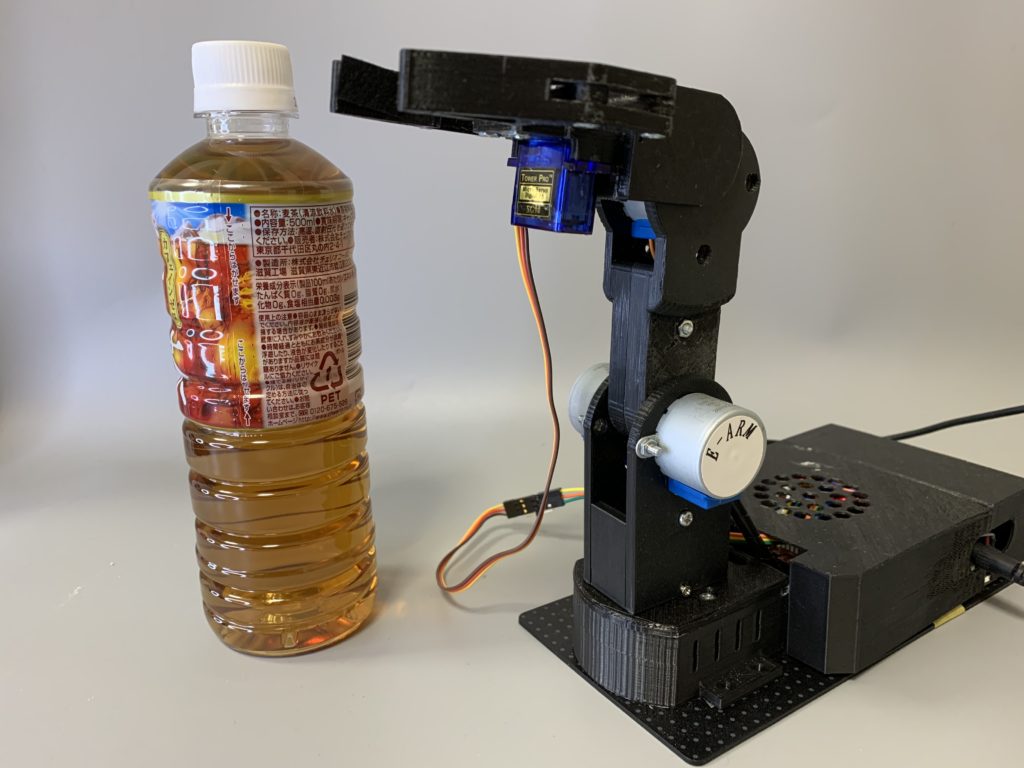
スクラッチから制御出来る3軸ロボットアームの試作機を製作しました。
学習用ですのでとてもミニサイズです。
アーム本体、グリッパーは3Dプリンタで作製、Arduino Nano、ステッピングモーターを使用しています。
現在、ESP32に変更しスマートフォンからも制御出来るように改良中です。